Testing of autonomous emergency braking systems
Easy to implement with driving robots from VEHICO!
Driving robots from VEHICO are ideally suited for testing Autonomous Emergency Braking Systems (AEB).
Convince yourself of our driving robots and implement the test requirements without any problems.
AEB Testing
We have the robots for your AEB test



Advantages of the VEHICO driving robots
Parameterisation not required
With our driving robots, you no longer have to set the control parameters. You install the driving robots in the vehicle and can start the driving tests directly. This saves you time and leads to faster results!
In addition, our driving robots convince with the following performance features:
- increasing the reproducibility
- fulfilment of the EuroNCAP test requirements
- Maximum accuracy by triggering the steering movement to the relative data of the GVT
- fast data analysis through integrated evaluation algorithms
- operation of the GVT from the VUT possible
- universally applicable for all vehicle types
- undisturbed manual vehicle operation
- short installation time, as parameters do not have to be adjusted
- compatible with all GPS systems such as Genesys, iMar, Oxford, Racelogic or others



Preconfigured templates
Continuous test support
uncomplicated input of the test parameters
Benefit from the experience of VEHICO's engineers: the control systems can all be used directly - there is no need for the tedious parameter setting required by other manufacturers!
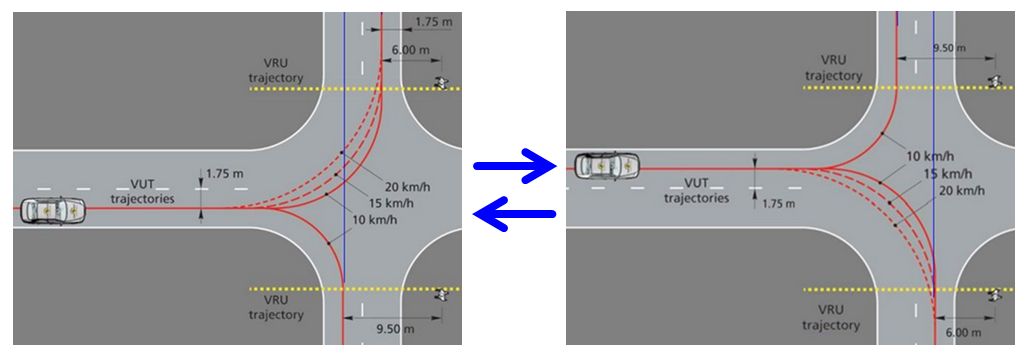
easy switching between left and right-hand traffic
Switching between left-hand and right-hand traffic is of course possible without any problems. By simply switching in the test setting you change the mode.
highly flexible script language
VEHICO has successfully relied on an intuitive script language for years with which all conceivable movement profiles can be individually programmed with simple commands. Numerous standard tests are already pre-configured. External trigger signals can also be taken into account.

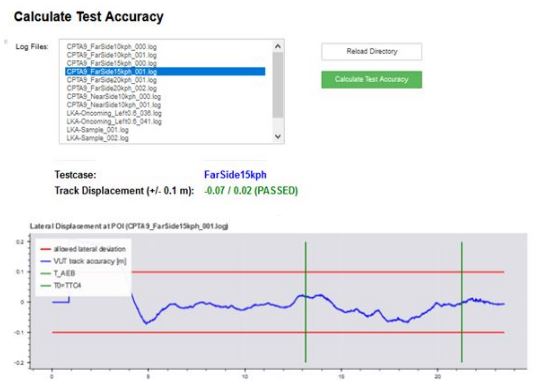
fast data evaluation
The data obtained are displayed and mapped directly .

AEB Testing
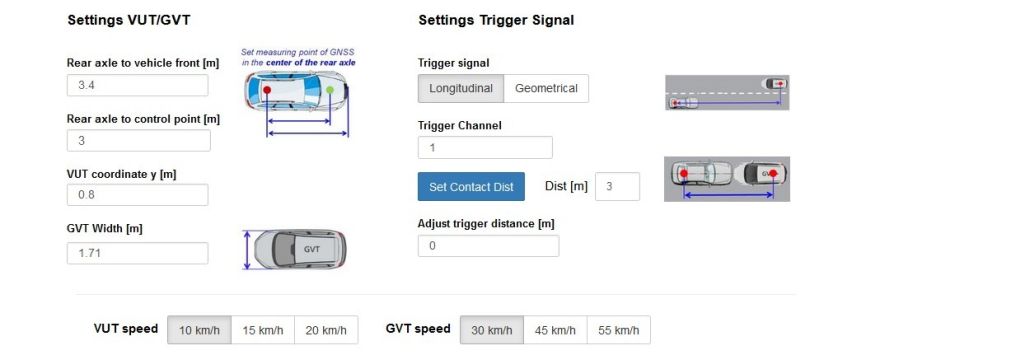
Implementation of EuroNCAP tests with VEHICO robots
In order to test the systems of the vehicle manufacturers, different accident scenarios are simulated in which the test vehicle hits a slower vehicle dummy, also called a target. For a reproducible result, it is necessary that the speeds of the vehicles, the relative distance of the vehicles to each other, the braking force of the test vehicle and the braking deceleration of the target must be precisely controlled and thus reproducibly maintained. In addition, the test vehicle and target must be track-controlled.
You can easily implement all these test requirements with our driving robots and use them to carry out the following EuroNCAP test protocols, among others:
AEB VRU - Vulnerable Road User
CPFA - Car-to-Pedestrian Farside Adult
CPNA - Car-to-Pedestrian Nearside Adult
CPNC - Car-to-Pedestrian Nearside Child
CPLA - Car-to-Pedestrian Longitudinal Adult
CPTA - Car-to-Pedestrian Turning Adult
CPRA - Car-to-Pedestrian Reverse Adult
CBNA - Car-to-Bicyclist Nearside Adult
CBNAO - Car-to-Bicyclist Nearside Adult Obstructed
CBFA - Car-to-Bicyclist Farside Adult
CBLA - Car-to-Bicyclist Longitudinal Adult
AEB C2C - Car-to-Car
CCRs - Car-to-Car Rear Stationary
CCRm - Car-to-Car Rear Moving
CCRb - Car-to-Car Rear Braking
CCFtap - CCar-to-Car Front Turn-Across-Path
Whether NCAP or NHTSA
we meet the test requirements
Our VEHICO driving robots meet the NCAP test requirements and the test scenarios can be driven with them.
In addition, our robots can also be used to implement the test scenarios of other New Car Assessment programmes or other authorities and test facilities.

Contact
Contact us
Do you have further questions or need more information?
We will be pleased to help you.
Contact us or one of our Salespartner.
Phone
+49 531 20835 110